Dataset Catalog
on requestRobot Arm
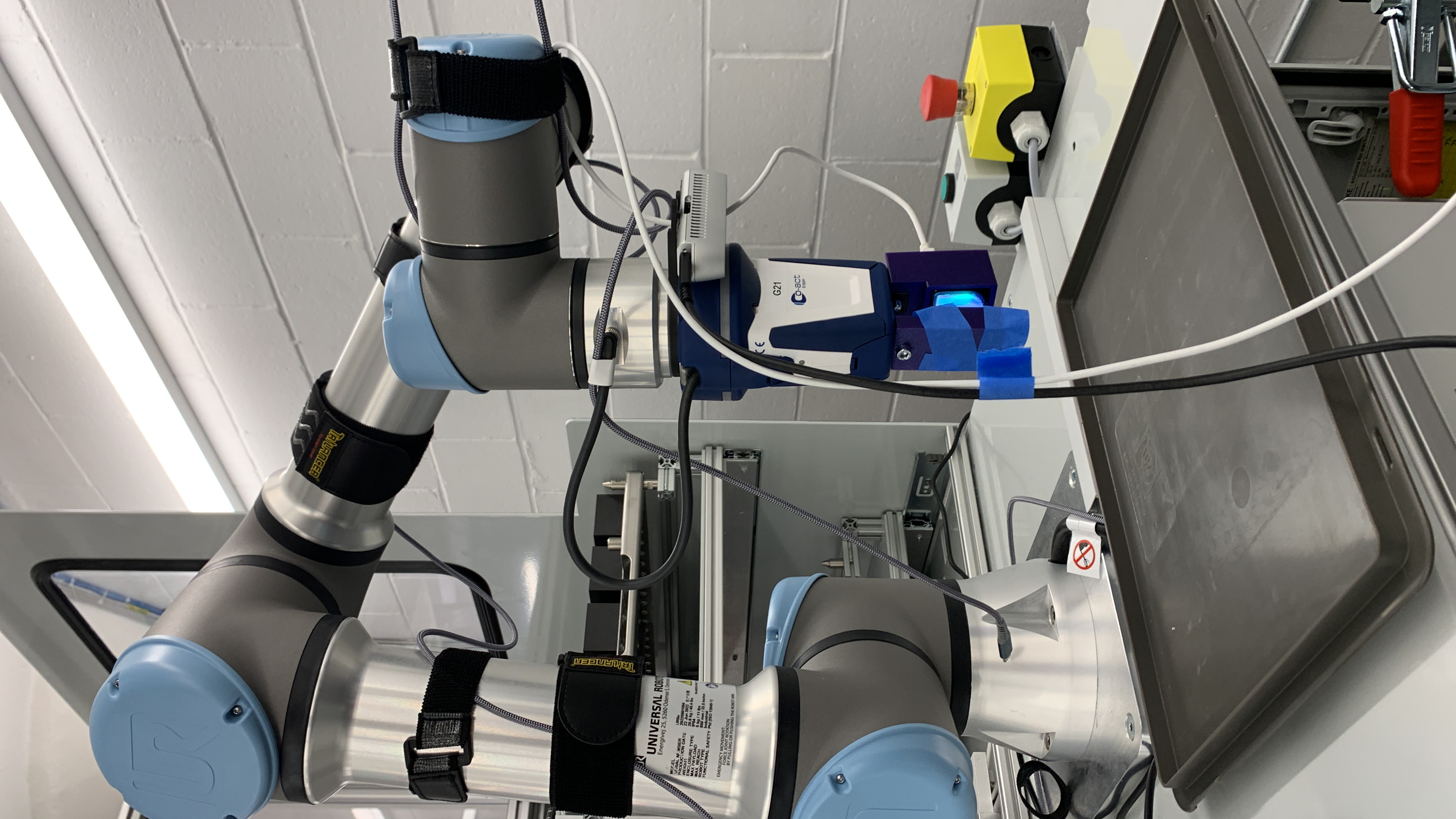
UR series, xArm series
Force, Torque, Tactile sensor data + Overview, Wrist view data.
Additional customisations possible.
Additional customisations possible.
Gripper
OnRobot, Robotiq, CoAct
Different gripper types off the shelf.
Custom 3D printed grippers possible too.
Custom 3D printed grippers possible too.
Method
Tele-Operation
Data is collected via tele-operation, or/and designed sequences for the robot arm.
Object Types
Form Factor
Soft, Hard, Deformable, solid, light, fabric among others.
Tasks
Manipulation Tasks
Pick-up drop, insert, grasp, among others.
Components
Setup
State of the art - industrial grade robot arms, meta quest tele-operation set.
Best tactile sensors on the market.
Best tactile sensors on the market.
Post-Processing
Data
Get post processed signals, from the primary data, along with annotated labels.
Custom collection available
We deploy our sensor arrays to collect task-specific data at your facility and/or on your hardware.
Use Cases
01
Foundation Model Pre-training
Provide real-world contact priors for large manipulation models. Multimodal touch+vision pairs close the gap between simulation and dexterous reality.
02
Contact-Rich Manipulation R&D
High-fidelity tactile signals for grasping, in-hand re-orientation, and contact-rich assembly. Accelerate your hardware development cycle.
03
Sim-to-Real Transfer
Real pressure distributions to calibrate your simulation tactile models. Reduce the reality gap without building your own sensing infrastructure.
04
Generalist Intelligent Robotics
Sub-millimeter force resolution for general object guidance, and precision task handling and tasks requiring ultra-fine contact sensing.
Talk To Us
Ready to train contact-aware robots?
A 20-minute call. We'll walk through the datasets most relevant to your use case and discuss custom collection options if needed.
Walk through the dataset catalog
See samples from every modality.
Discuss your training setup
PyTorch, JAX, or custom pipeline.
Scope custom collection
If the catalog doesn't fit your tasks.
or email us at hello@physicalaidata.co